| Accueil site | Tableur | Programmation | Outils XML | Tic en stock | Téléchargement | Informations |
|
|
|||||||
|
 Tortue et Logo |
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
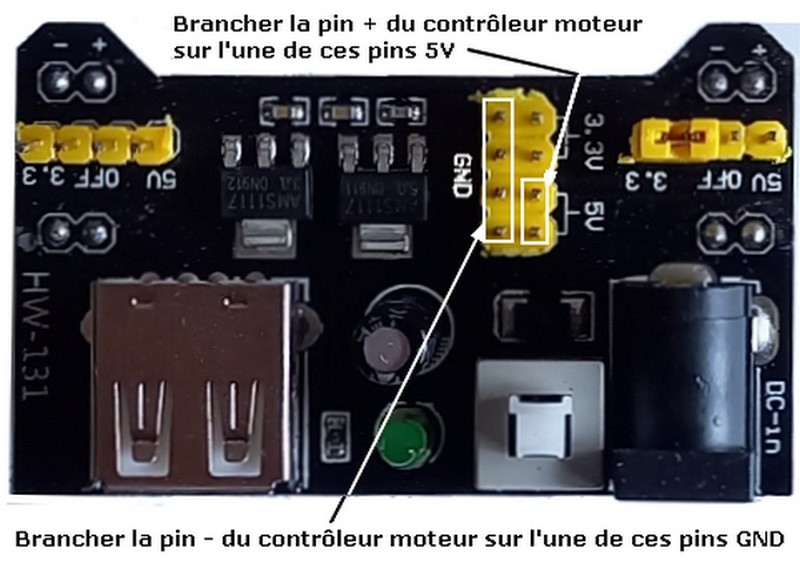
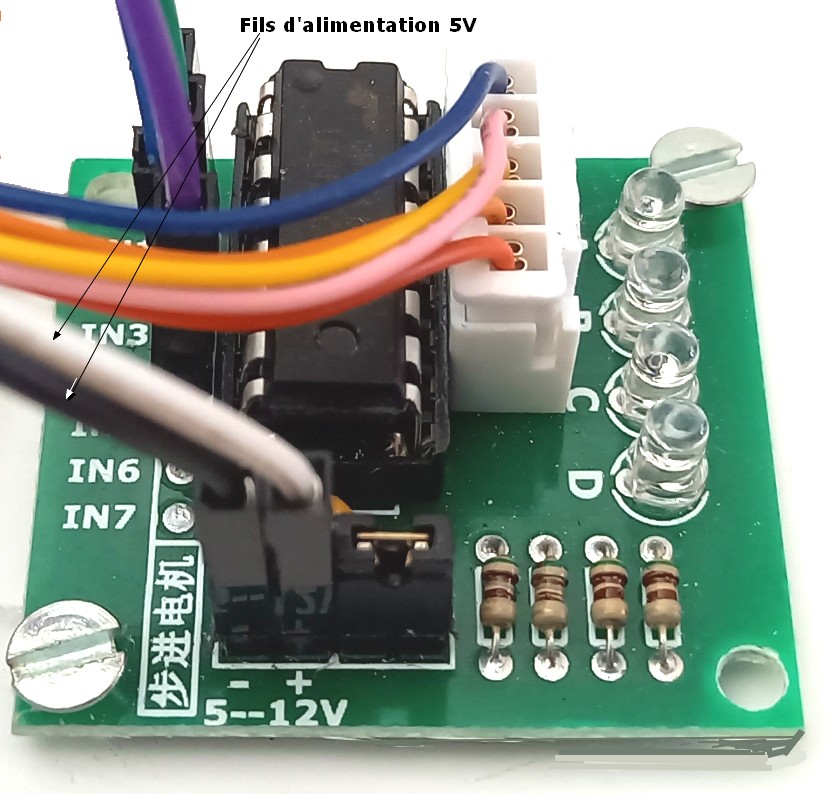
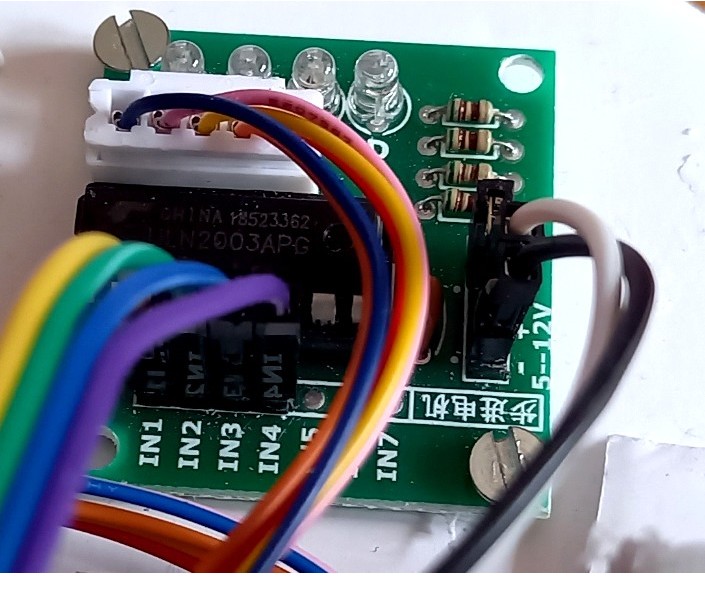
Avant de poursuivre le montage de la tortue (plaque supérieure), il convient de tester la bonne marche des moteurs : câblage, logiciel, essai et ajustement. Câblage des moteurs Poser la carte Uno R3 sur le support de la roue pivotante en intercalant un morceau de carton mousse pour faire isolant. Repérer sur la carte d'alimentation les pins + 5V et la masse (GND) et sur la carte contrôleur de chaque moteur le pin + et le pin - (ou GND)
Il faut commencer par relier la masse (- ou GND) entre les deux cartes d'alimentation puis au pin - de chacune des cartes contrôleur des moteurs. Il faut également relier la masse (GND) de la carte d'alimentation à l'une des masses (broche GND) de la carte Arduino. Relier ensuite le + de la carte contrôleur à une des deux pins 5V de la carte d'alimentation. 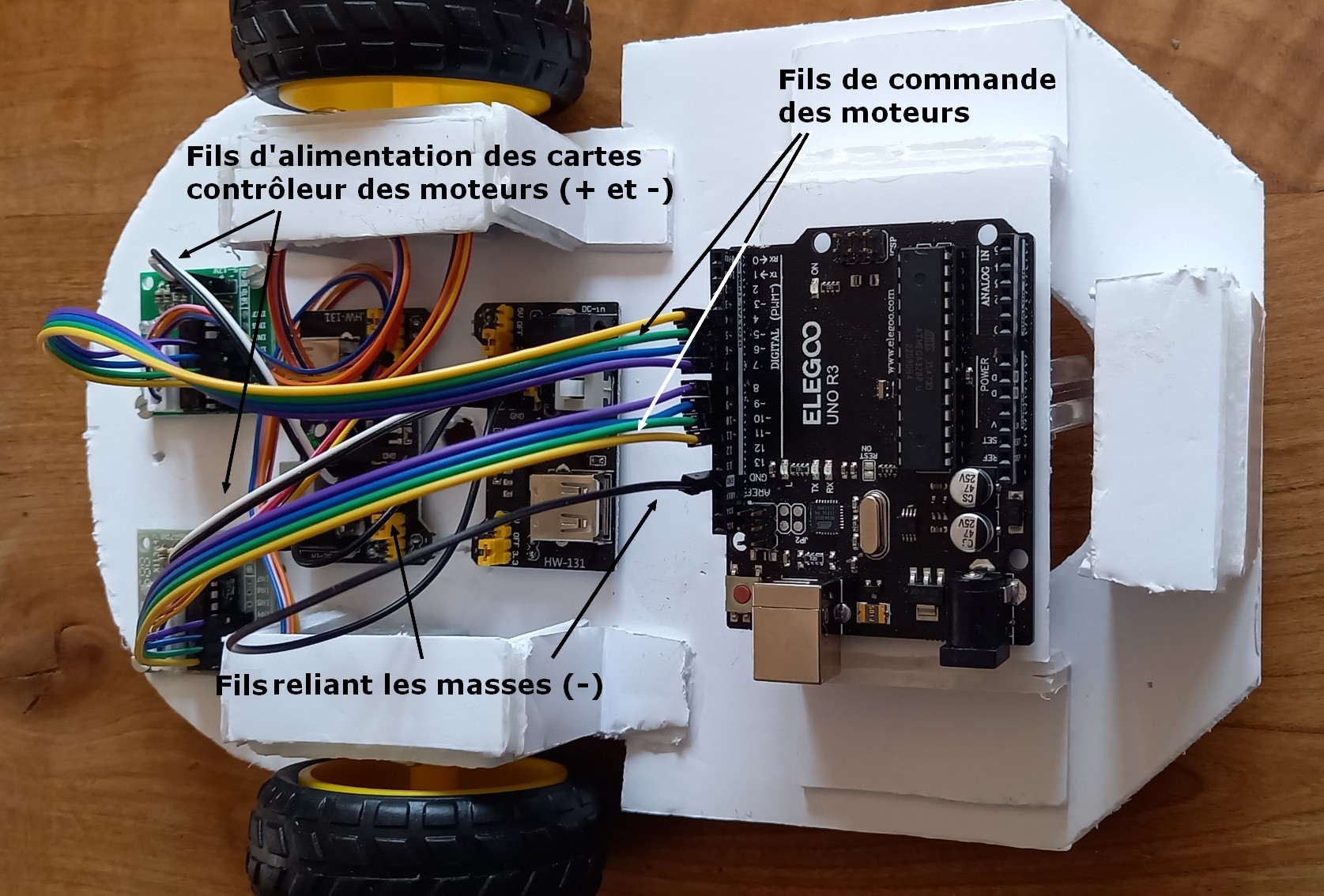 Le câblage des cartes contrôleur des moteurs sur la carte UNO R3 se font (provisoirement du côté de la carte Uno R3) de la manière suivante :
Introduire une pile de 9 V dans deux boîtiers. Mettre les boutons des boîtiers en position "OFF" et les brancher provisoirement aux cartes d'alimentation. Brancher également le câble USB entre la carte Uno R3 et l'ordinateur. 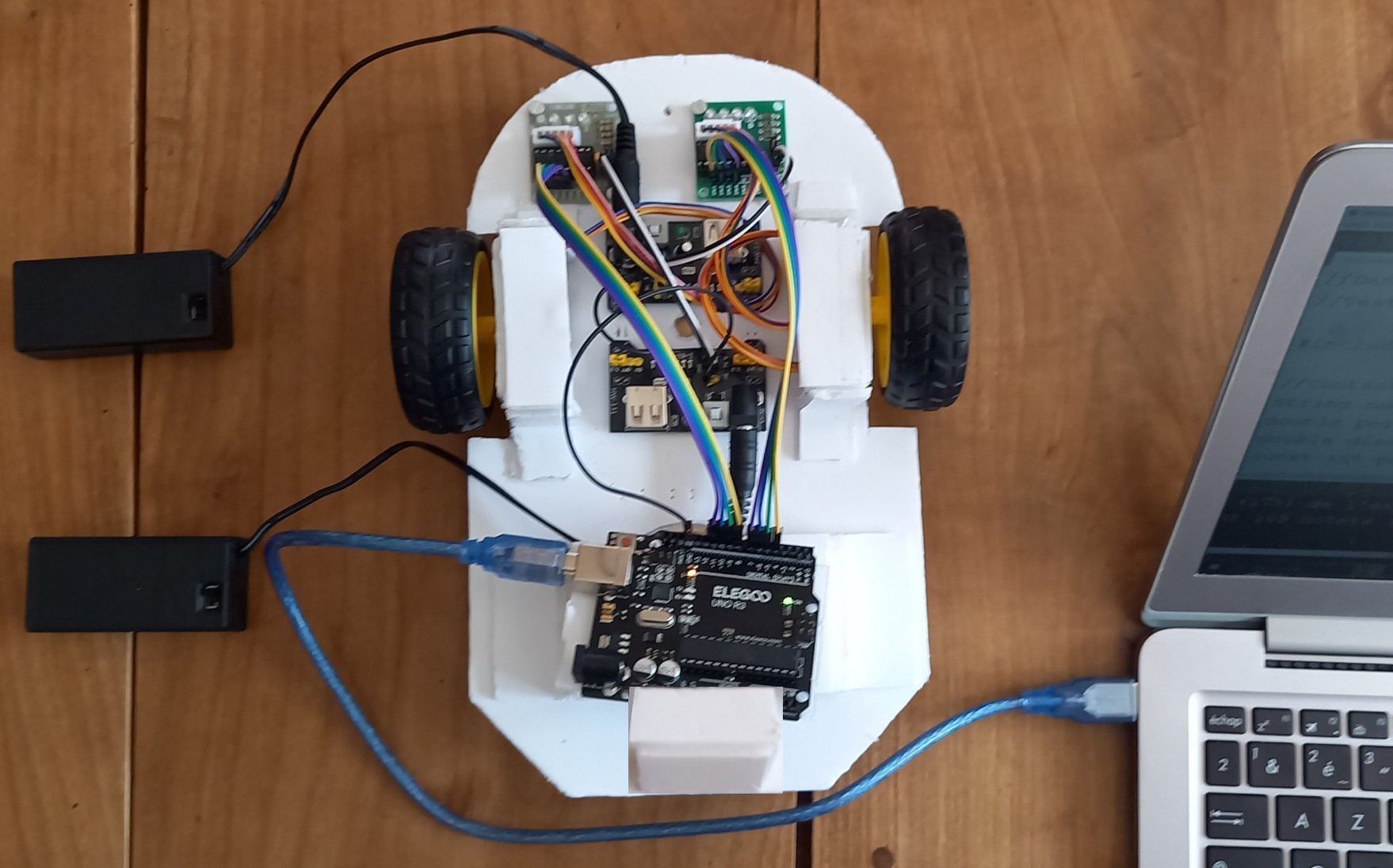 Logiciel Il faut commencer par télécharger si ce n'est déjà fait le logiciel d'Arduino (c'est à dire l'environnement de dévelopement intégré d'Arduino (fichier exe - 162 Mo) qui supporte toute une gamme de carte avec des microcontrôleurs divers. Il existe plusieurs versions pour Windows, Linux et MacOS, télécharger la version correspondant à l'ordinateur cible. Installer ce logiciel (sous Windows, il a été téléchargé dans le dossier Téléchargements, double-cliquer sur le nom du fichier). L'installation créée aussi un dossier Arduino dans le dossier Documents. Après cette installation, Il faut également télécharger une bibliothèque ou librairie nommée "Stepper" (fichier Stepper.zip - 10 ko) qui est nécessaire pour faire fonctionner les Moteurs pas à pas. Pour installer cette librairie, lancer l'IDE d'Arduino et par le menu Croquis puis Inclure une bibliothèque, cliquer sur Ajouter la bibliothèque.zip et parcourir les dossiers jusqu'au dossier Téléchargements. 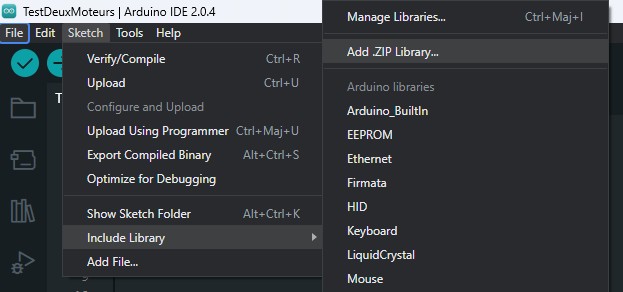 Cliquer alors sur le fichier Stepper.zip. L'installation de la première bibliothèque ajoute automatiquement le dossier Librairies dans le dossier Arduino. C'est dans ce dossier que la librairie Stepper sera installée. Télécharger le programme : TestDeuxMoteurs (fichier zip - 1 Ko) puis copier ce fichier du dossier Téléchargements vers le dossier Arduino et décompresser le fichier zip. On obtient alors le dossier TestDeuxMoteurs qui contient le fichier TestDeuxMoteurs.ino Lancer l'IDE d'Arduino et par le menu Fichiers puis Ouvrir, parcourir les dossiers jusqu'au dossier Arduino puis TestDeuxMoteurs et cliquer sur le fichier TestDeuxMoteurs.ino Essai des moteurs Commencer par surélever la plaque support avec, par exemple, un morceau de bois pour que les roues puissent tourner dans le vide et mettre les boutons des boîtiers des piles sur "ON". Le câble USB reliant la carte Uno R3 à l'ordinateur étant branché, il suffit de téléverser le programme sur la carte Uno R3 par le deuxième bouton de la barre d'outils : 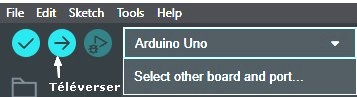 Dès le téléversement fini, le programme s'exécute automatiquement : les moteurs devraient se mettre en marche (normalement dans le même sens) : d'abord pendant 3 secondes dans le sens de la marche avant, puis 3 secondes dans le sens de la marche arrière, 3 seconde avec la roue droite en marche arrière et la roue gauche en marche avant (tourne à droite), 3 secondes avec la roue droite en marche avant et la roue gauche en marche arrière (tourne à gauche). Puis le cycle recommence. Pour arrêter il faut mettre les boutons des boîtiers des piles sur "OFF" et débrancher le câble USB. Ajustements Si aucune roue ne tourne, il faut voir l'état des piles, revoir le câblage (voir si les câbles sont bien enfoncés sur les pins de la carte contrôleur des moteurs et sur la carte Uno R3), voir si les moteurs sont bien alimentés (en particulier l'interrupteur de la carte d'alimentation bien enfoncé, une LED doit être allumée) Si au départ une roue ne tourne pas dans le bon sens, ce n'est pas grave, il suffit de modifier le programme (Fonction Moteurs) ou d'inverser le câblage de la carte contrôleur du moteur sur la carte Uno R3. 90% des pannes proviennent d'un mauvais contact (câble mal enfoncé) ou d'une erreur de câblage (câble branché sur un autre pin que le bon).
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
© SiteFormTice Février 2023 - Tous droits réservés. Limitation à l'usage non commercial, privé ou scolaire.