
| Accueil site | Tableur | Programmation | Outils XML | Tic en stock | Téléchargement | Informations |
|
|
|||||||
|
 Plan IPT |
| |||||
|
Un système automatisé se compose d'un dispositif de commande qui envoie ou reçoit des informations, d'une interface pour transformer ces informations en signaux électriques appropriés (Entrées/Sorties) avec éventuellemnt un module de puissance (Sorties) et d'une partie opérative (comprenant différents capteurs et actionneurs) 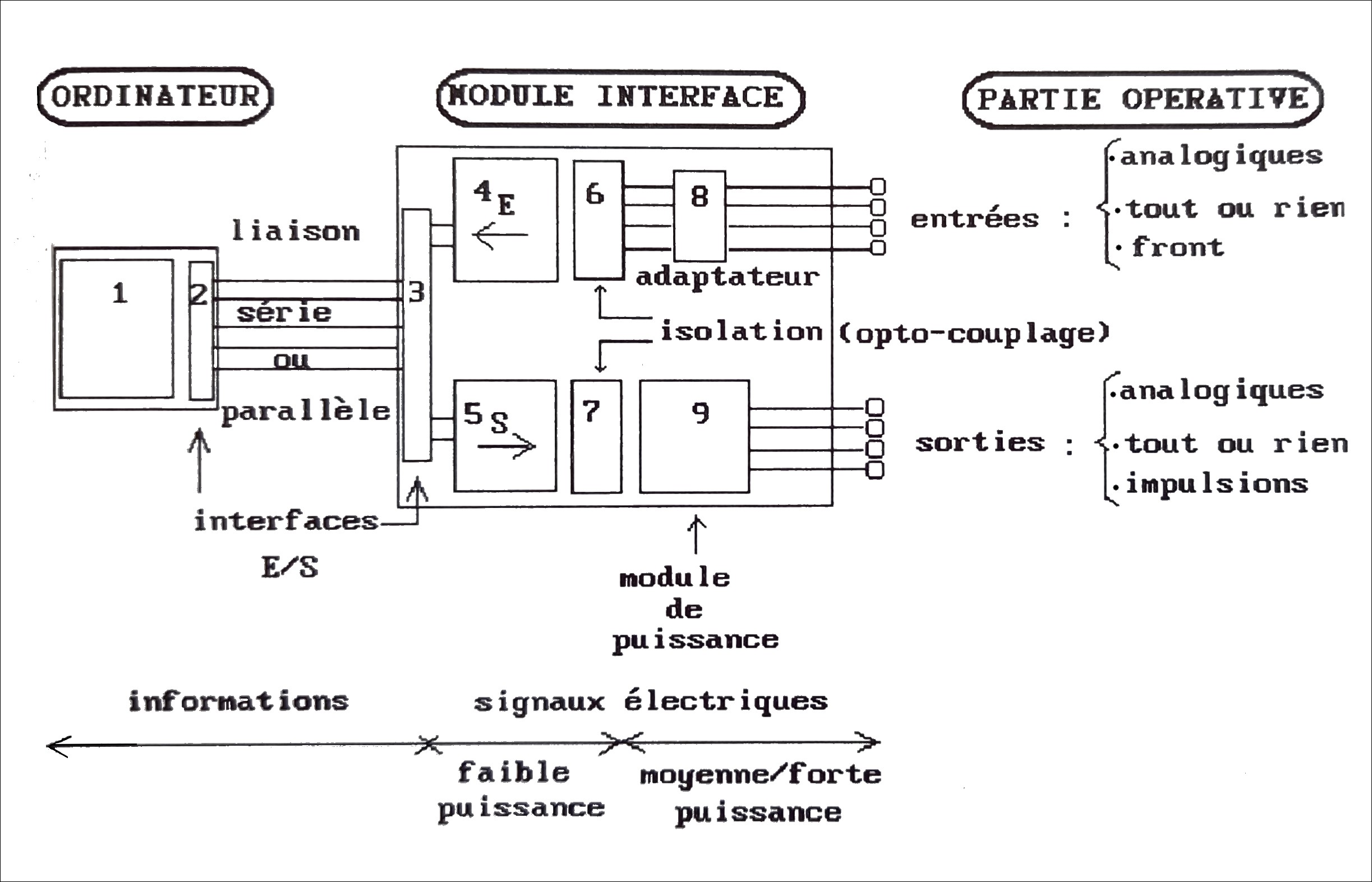 Les capteurs peuvent être analogique (par exemple pour la mesure d'une grandeur), en tout ou rien ou en détection de front montant ou descendant. Les actionneurs peuvent recevoir des signaux analogiques, en tout ou rien ou des impulsions. Lorsque l'interface accepte des signaux analogiques alors elle possède aussi des circuits de conversion Analogique/Numérique (CAN) et permet l'ExAO. Le dispositif de commande peut être un ordinateur, un automate programmable ou de la logique câblée. Les premières réalisations avec TO7 ou MO5 Contrôleur de communication comme interface Pour les écoles possédant un TO7 et une imprimante, il était facile d'utiliser le contrôleur de communication (CC 90-232) comme interface en utilisant le port parallèle. Ce contrôleur était équipé d'un circuit intégré 6821p gérant la communication série ou parallèle en particulier pour une imprimante. Mais on pouvait l'utiliser pour autre chose en connaissant les adresses permettant d'initialiser ce composant. On pouvait ainsi disposer de 8 broches que l'on pouvait programmer en Entrée ou Sortie. Il suffisait de connaître le brochage du connecteur de sortie du contrôleur de communication et de brancher des fils vers une maquette. 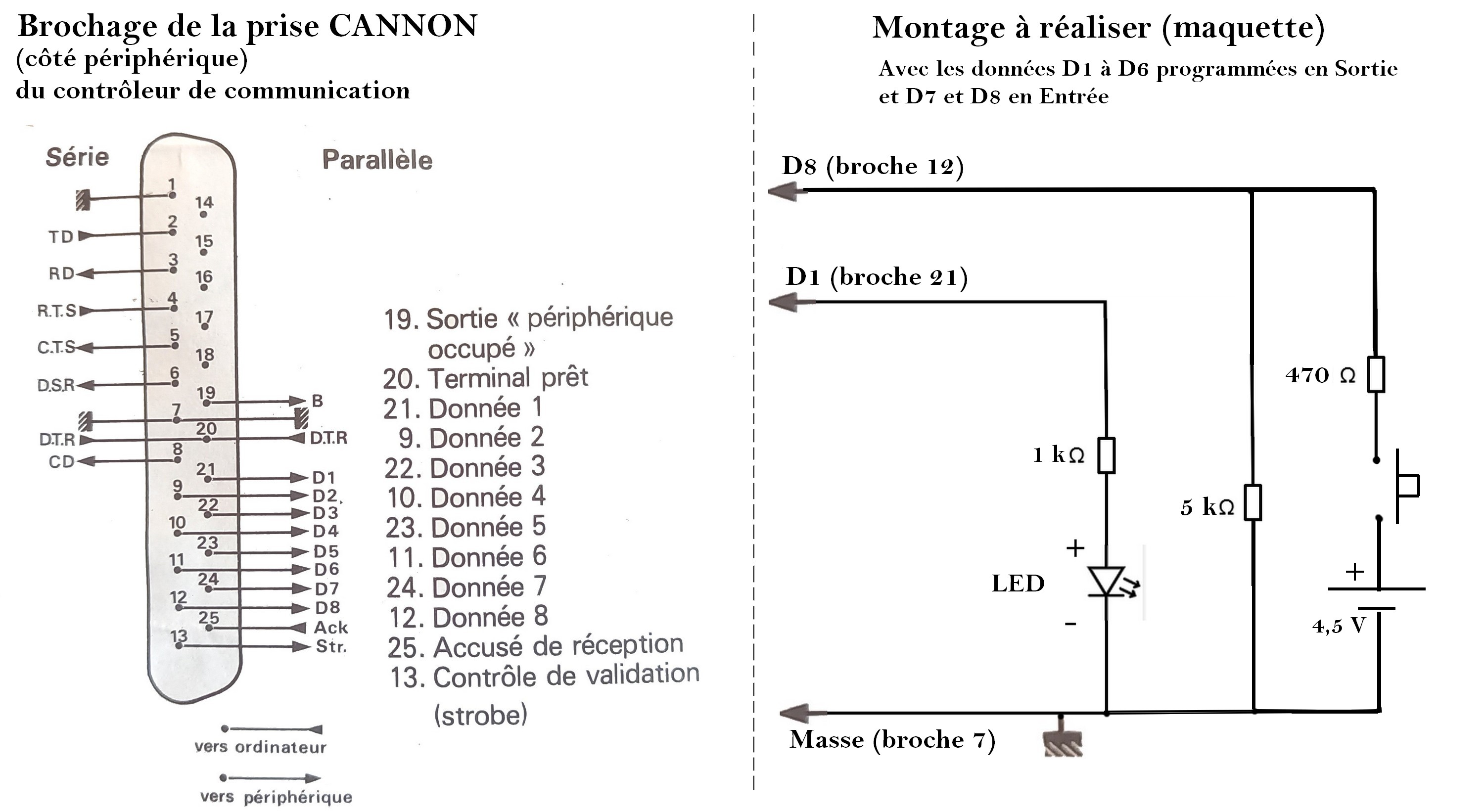 La programmation pouvait se faire facilement en BASIC ou LOGO. Voici, par exemple, le programme en Basic du contrôleur de communication pour avoir 6 Sorties et 2 Entrées. Les premières réalisations se contentaient d'allumer ou éteindre une ou plusieurs LED et de programmer différents effets (clignotement, allumage et extinction successifs d'une série de led, ...). Puis simuler des feux de carrefour et même piloter un chariot (en ajoutant un étage de puissance car le contrôleur de communication ne pouvait pas alimenter directement un moteur, l'intensité sur chaque broche étant limitée à quelques milliampères). Deux articles du bullentin de l'EPI (n°44 et n°45) décrivent quelques réalisation avec le contrôleur de communication. Interface PK 7 L'interface se présentait sous forme d'un circuit imprimé supportant des composants, une fiche identique à celle des L.E.P. TO7 ou MO5 et trois dominos. La fiche permettait de se raccorder à l'ordinateur par la prise du LEP. Cette interface était très peu chère mais limitée à une Entrée et une Sortie, donc uniquement pour une première initiation. Sur l'un des dominos de PK7 (comme : prise cassette) on connectait une pile standard de 4,5 V, sur un deuxième le capteur d'entrée et sur l'autre l'actionneur en sortie (on pouvait connecter directement un moteur sur la sortie car la prise du LEP gérait le moteur du magnétophone (donc présence d'un étage de puissance). Un article paru dans le bulletin de l'EPI n°45 (mars 1987) décrit cette interface, ainsi que quelques activités et programmes. Interface avec un PIA 6821 Une des premières interfaces construites à moindre coût a été faite autour du PIA 6821, le même composant qui était utilisé dans le contrôleur de communication. Ce PIA 6821 possédait deux ports de 8 Entrées ou Sorties ce qui permettait des maquettes plus sophistiquées. L'interface de la cellule Logiciels CARI de l'Académie de Nantes diffusée par le CNDP - CRDP de Nantes était l'une de ces interfaces. Editeurs privés Des sociétés privées ont commencé à produire des interfaces liées à un ensemble de maquettes (en général à construire avec des éléments de base) et pilotées par le logiciel maison. On peut citer dans cette catégorie : Lego Technic, Fishertechnick, ... Lego Technic Control Le système Lego Technic Control a été l'un des plus utilisé en raison de sa simplicité et sa robustesse. 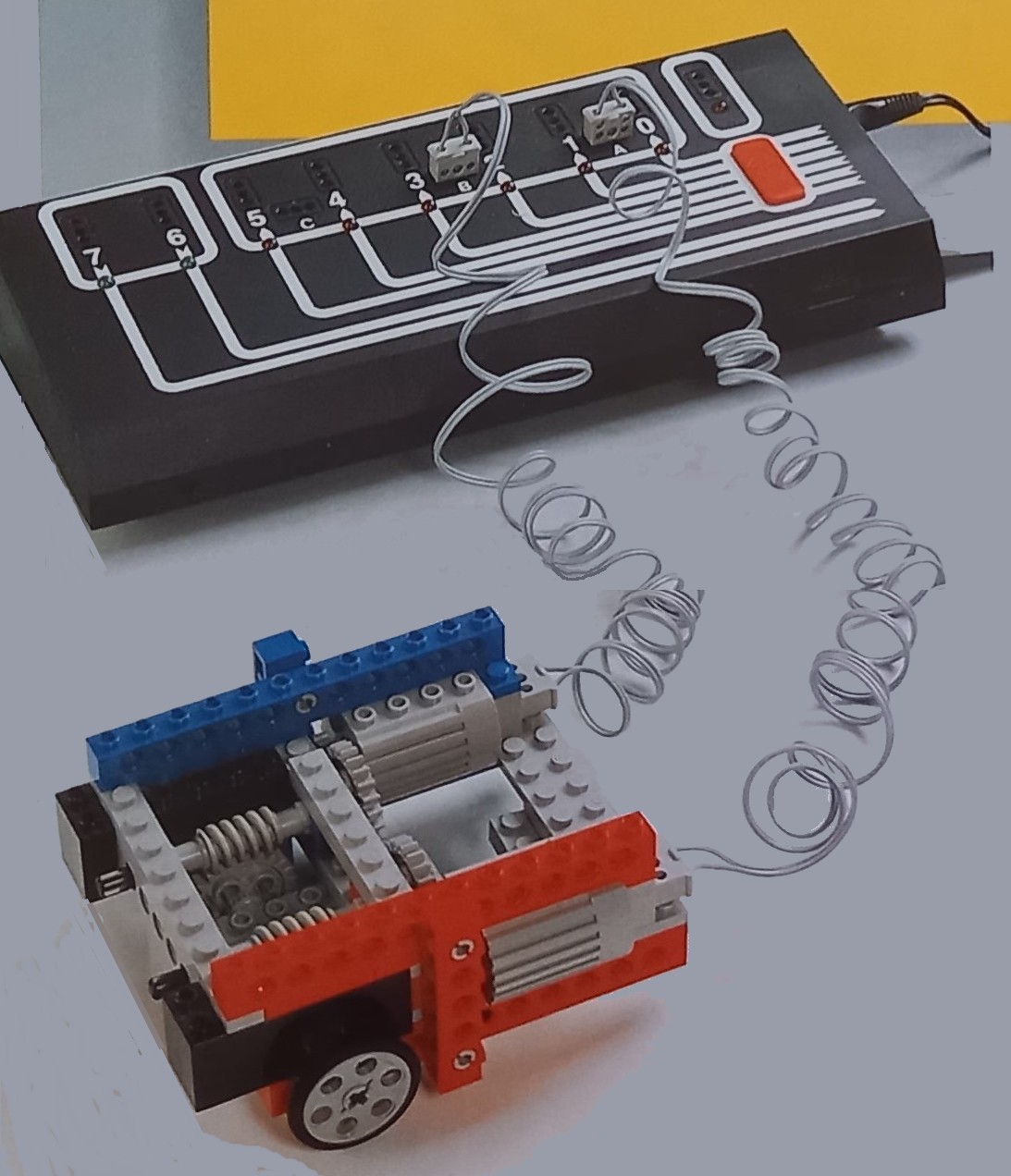 Cet ensemble se composait d'un boitier de communication pour MO5-MO6/TO7-70, d'un câble plat reliant le boîtier à l'ordinateur et d'un logiciel de commande LEGO-Lines 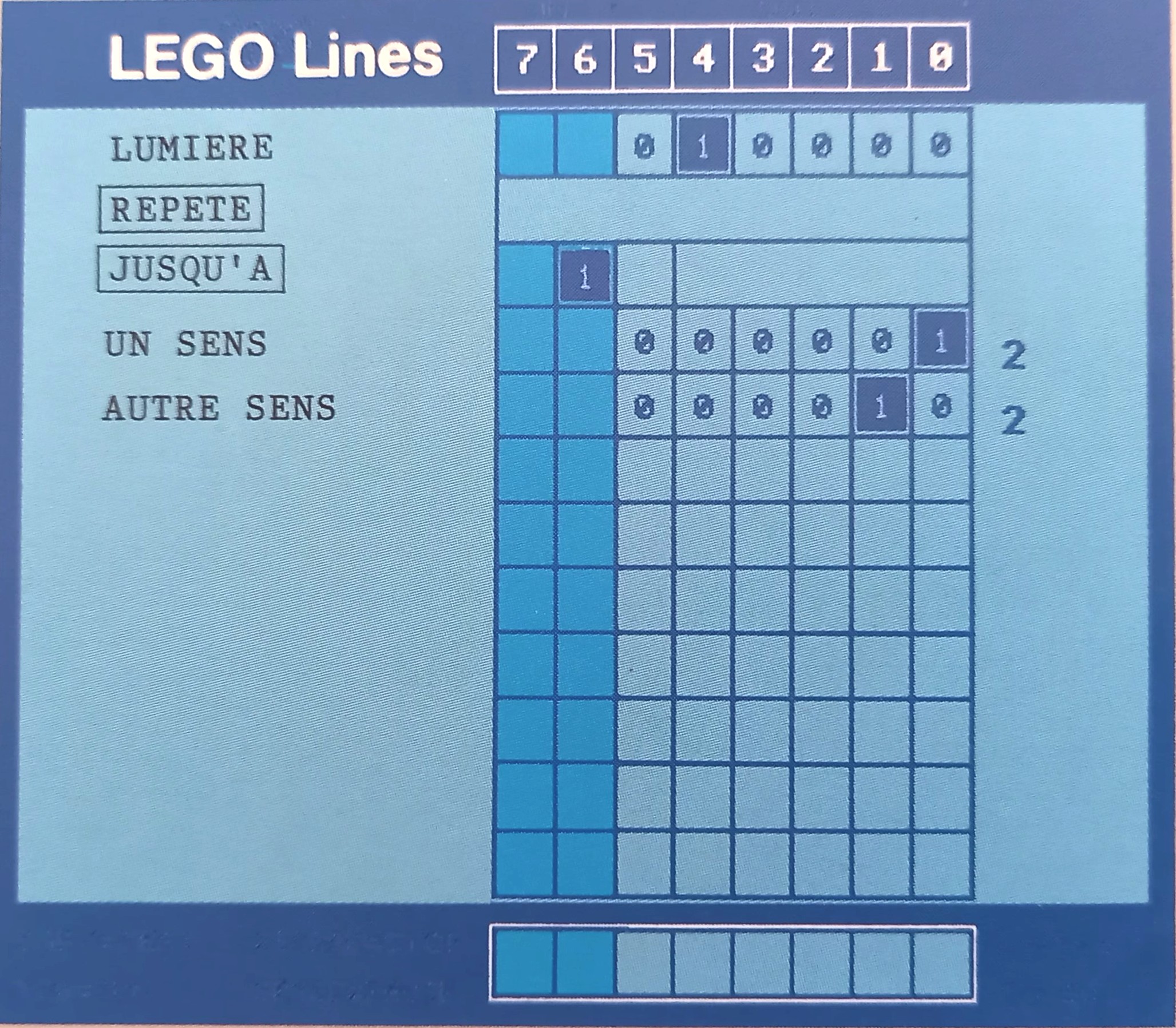 Ce logiciel très simple à utiliser, représentait chaque étape par une ligne pour indiquer l'état (par des 0 et 1) des sorties (bit 0 à 5). On passait à l'étape suivante en indiquant soit une entrée (bit 6 et 7) en attente d'un niveau haut ou bas (0 ou 1) ou par une temporisation (en seconde). On disposait également de 7 mots-clés en particulier pour les répétitions. On pouvait acquérir séparément les différentes maquettes (parties opératives) disponibles comme : un buggy universel, une table traçante, un bras 3 axes, ... Ainsi qu'un livre de ressources et des fiches de travail. Le boitier ne permettait que 2 entrées et 6 sorties, ces dernières se faisant au travers d'un module de puissance limité car prévu pour les moteurs des boîtes LEGO (l'alimentation des sorties étant fournie par un transformateur type alimentation MO5). En 1990, le système Lego-Technic Control était aussi disponible pour PC et compatibles. Fishertechnik Les systèmes automatsés Fishertechnik se composaient de maquettes (construites avec des blocks Fishertechnik) et d'une interface pour le pilotage sous la forme d'un boîtier à couvercle transparent contenant un module de puissance qui était à relier au port parallèle de l'ordinateur (TO7, MO5, Atari, Amstrad 6128, Commodore C64 et PC).
L'interface possédait 8 entrées et 8 sorties (en tout ou rien) liées par paire pour la commande de moteur (4 possibles). L'alimentation fournie est, comme pour LEGO, prévue pour les boîtes de montage Fishertechnik. Deux entrées analogiques étaient aussi disponibles. Le fait d'utiliser le port parallèle entrainait des astuces électroniques mais aussi une complexité de programmation incluant l'utilisation de routine en assembleur. De manière générale, les montages disponibles étaient assez fragiles en milieu scolaire. Interface et partie opérative en dotation dans les collèges et lycées Interface IP16 Cet interface dans un boîtier métallique a été en dotation dans certains collèges pour la Technologie. Elle était connectée à l'ordinateur par le port série (compatible MO5/TO7 ainsi que PC). La première version (MO5/TO7) disposait de 8 entrées et 8 sorties numériques, ainsi que de 4 entrées et 4 sorties analogiques. Elle pouvait ainsi contrôler des capteurs de température, de lumière, de pression, etc. L'IP16 était programmable en langage Logo ou Basic. La deuxième version (PC) avait 12 entrées/sorties en tout ou rien, 2 entrées et 2 sortie analogiques, 4 sorties sur relais, 4 entrées d'interruption ainsi que 4 sorties pour les bobines d'un moteur pas à pas. Le bras YOUPI Youpi était un bras robot doté de cinq degrés de liberté commercialisé dans les années 80 par JD Productique, à destination de l'enseignement en technologie et en automatique. Il a été utilisé dans les collèges et les lycées techniques,
A l'origine, Youpi était connecté à un micro-ordinateur 8 bits souvent de la marque Thomson : MO5 et TO7/70. Toutefois, la connexion du Youpi à un ordinateur utilisait uniquement les 8 bits d'un port parallèle monodirectionnel. Il pouvait donc être connecté, à priori, à tout ordinateur possédant un port parallèle. Des indications plus précises, en particulier pour la connexion et la programmation du bras, se trouvent sur le site d'Edouard Forler à l'adresse https://youpi.forler.ch/ et sur le site de l'association Pobot.
|
||||||
© SiteFormTice avril 2021 - Tous droits réservés. Limitation à l'usage non commercial, privé ou scolaire.


